21_RS485简单讲解#
RS485简单讲解#
参考代码
Linux 4.9.88
Documentation\serial\serial-rs485.txt
Linux 5.4
Documentation\driver-api\serial\serial-rs485.rst
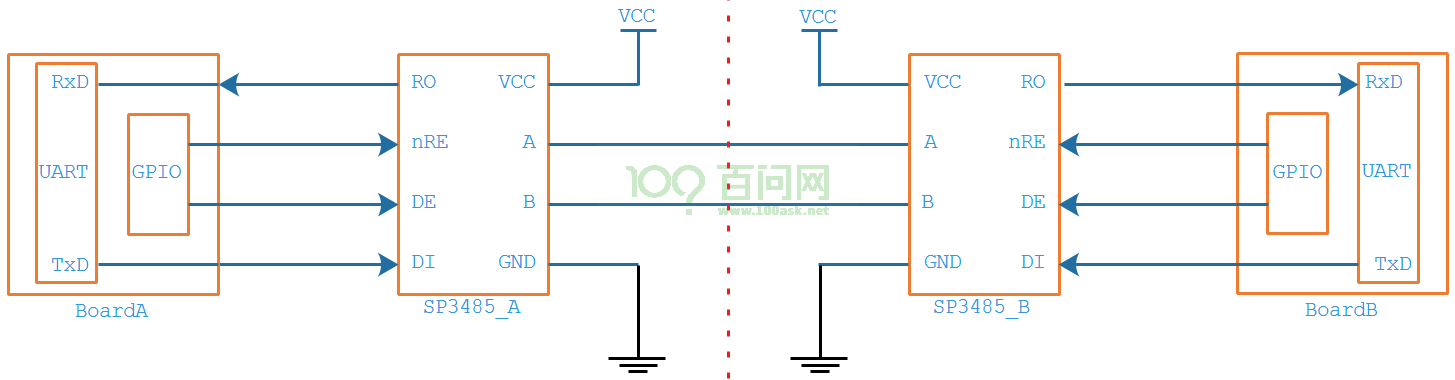
1. RS485线路图#
RS485使用A、B两条差分线传输数据:
要发送数据时
把SP3485的DE(Driver output Enable)引脚设置为高
通过TxD引脚发送
1给SP3485,SP3485会驱动A、B引脚电压差为+2~+6V通过TxD引脚发送
0给SP3485,SP3485会驱动A、B引脚电压差为-6~-2VSP3485自动把TxD信号转换为AB差分信号
对于软件来说,通过RS485发送数据时,跟一般的串口没区别,只是多了DE引脚的设置
要读取数据时
把SP3485的nRE(Receiver Output Enable)引脚设置为低
SP3485会根据AB引脚的电压差驱动RO为1或0
RO的数据传入UART的RxD引脚
对于软件来说,通过RS485读取数据时,跟一般的串口没区别,只是多了nRE引脚的设置
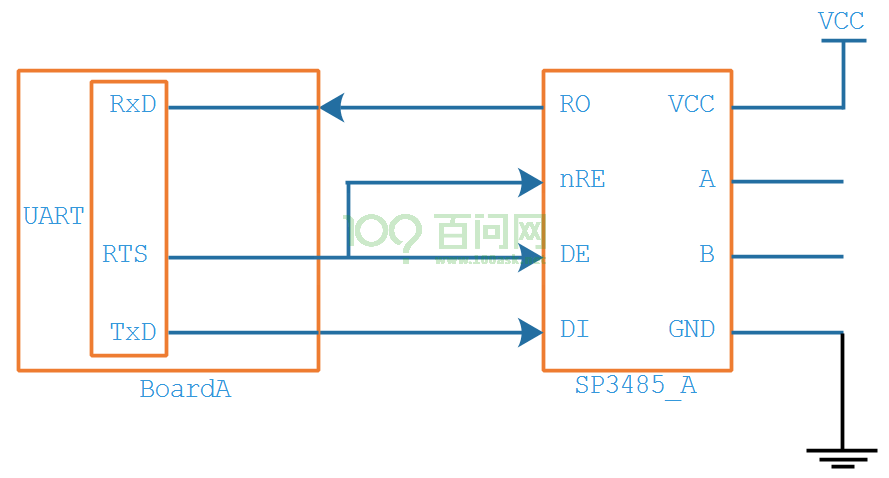
nRE和DE使用同一个引脚时,可以简化成这样:
发送:设置DE为高,发送,设置DE为低
接收:无需特殊设置
2. RS485应用编程#
2.1 标准用法#
在Linux的串口驱动中,它已经支持RS485,可以使用RTS引脚控制RS485芯片的DE引脚,分两种情况
有些UART驱动:使用UART的RTS引脚
有些UART驱动:使用GPIO作为RTS引脚,可以通过设备树指定这个GPIO
在使用RS485发送数据前,把RTS设置为高电平就可以。
通过serial_rs485结构体控制RTS,示例代码如下:
#include <linux/serial.h>
/* 用到这2个ioctl: TIOCGRS485, TIOCSRS485 */
#include <sys/ioctl.h>
struct serial_rs485 rs485conf;
/* 打开串口设备 */
int fd = open ("/dev/mydevice", O_RDWR);
if (fd < 0) {
/* 失败则返回 */
return -1;
}
/* 读取rs485conf */
if (ioctl (fd, TIOCGRS485, &rs485conf) < 0) {
/* 处理错误 */
}
/* 使能RS485模式 */
rs485conf.flags |= SER_RS485_ENABLED;
/* 当发送数据时, RTS为1 */
rs485conf.flags |= SER_RS485_RTS_ON_SEND;
/* 或者: 当发送数据时, RTS为0 */
rs485conf.flags &= ~(SER_RS485_RTS_ON_SEND);
/* 当发送完数据后, RTS为1 */
rs485conf.flags |= SER_RS485_RTS_AFTER_SEND;
/* 或者: 当发送完数据后, RTS为0 */
rs485conf.flags &= ~(SER_RS485_RTS_AFTER_SEND);
/* 还可以设置:
* 发送数据之前先设置RTS信号, 等待一会再发送数据
* 等多久? delay_rts_before_send(单位ms)
*/
rs485conf.delay_rts_before_send = ...;
/* 还可以设置:
* 发送数据之后, 等待一会再清除RTS信号
* 等多久? delay_rts_after_send(单位ms)
*/
rs485conf.delay_rts_after_send = ...;
/* 如果想在发送RS485数据的同时也接收数据, 还可以这样设置 */
rs485conf.flags |= SER_RS485_RX_DURING_TX;
if (ioctl (fd, TIOCSRS485, &rs485conf) < 0) {
/* 处理错误 */
}
/* 使用read()和write()就可以读、写数据了 */
/* 关闭设备 */
if (close (fd) < 0) {
/* 处理错误 */
}
2.2 自己控制引脚#
发送之前,自己设置GPIO控制DE引脚。
3. 驱动速览#
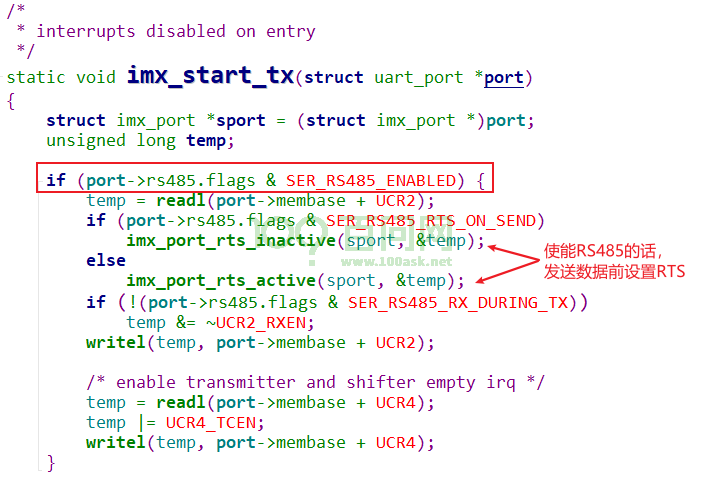
3.1 IMX6ULL#
源码为:Linux-4.9.88\drivers\tty\serial\imx.c:
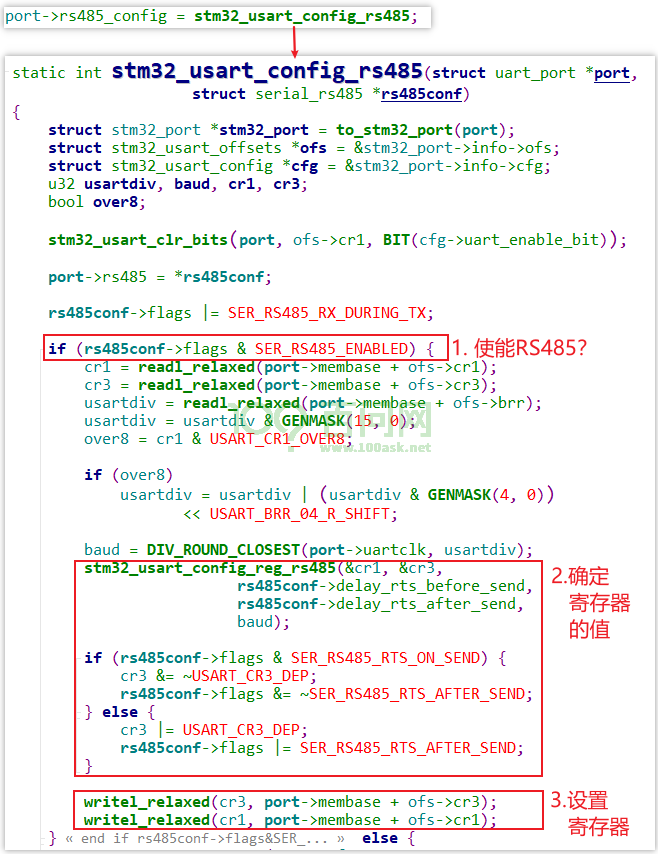
3.2 STM32MP157#
源码为:Linux-5.4\drivers\tty\serial\stm32-usart.c。
STM32MP157的UART功能强大,可以配置它:
发送数据时自动设置RTS信号
设置时间值:RTS使能后过多久发送数据,发送完数据后过多久取消RTS
配置好后,在发送RS485数据时就不需要显示地控制RTS了
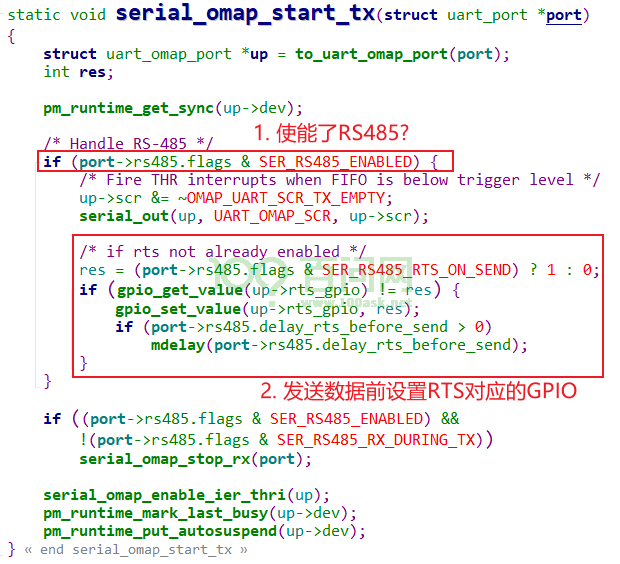
3.3 使用GPIO的RS485驱动#
这里只是举个例子。
源码为:Linux-4.9.88\drivers\tty\serial\omap-serial.c。
1. 从设备树获得用作RTS的GPIO#
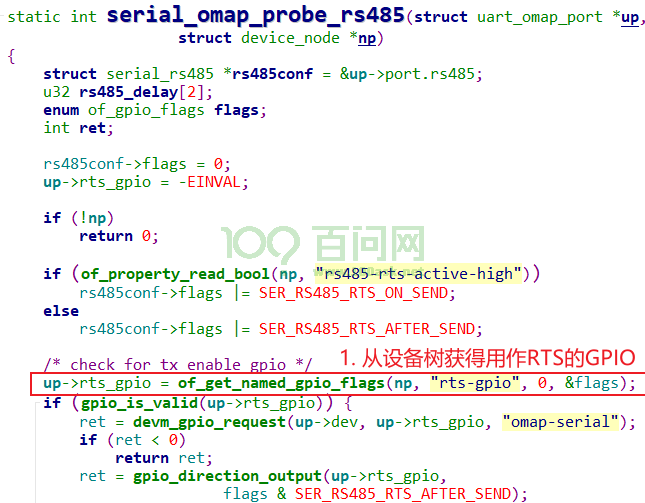
2. 发送数据前设置GPIO#